Servo System ในระบบอัตโนมัติคืออะไร?
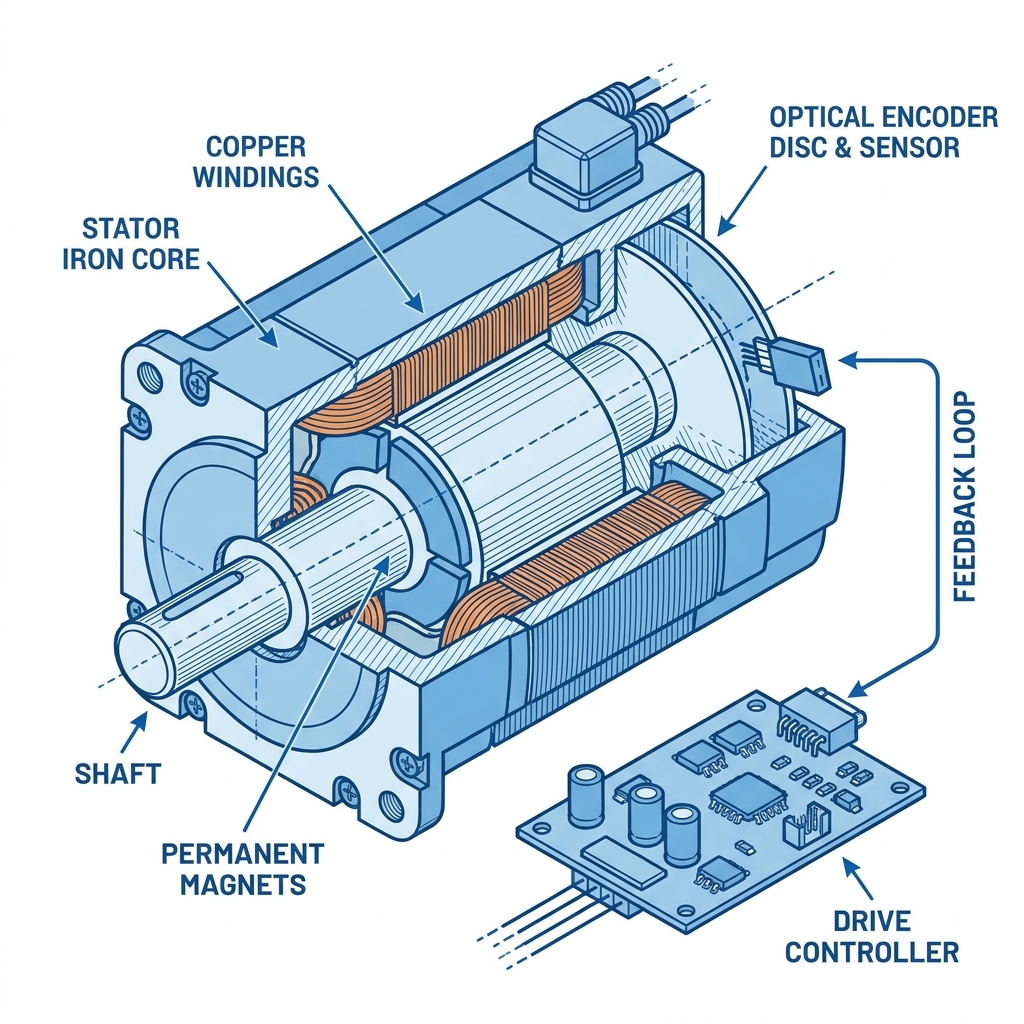
Servo System (ระบบเซอร์โว) ประกอบด้วย 3 องค์ประกอบหลัก ได้แก่ Servo Motor, Servo Drive (Amplifier) และ Encoder (Feedback Device) ทำงานร่วมกันเป็น Closed-Loop Control System เพื่อควบคุมตำแหน่ง ความเร็ว และแรงบิด (Torque) ด้วยความแม่นยำสูงมาก ในโรงงานอุตสาหกรรม Servo System เป็น “กล้ามเนื้อ” ที่ขับเคลื่อนหุ่นยนต์ เครื่อง CNC และเครื่องจักรแม่นยำทุกประเภท
หลักการทำงานของ Servo System
Closed-Loop Feedback Control
จุดที่ทำให้ Servo System แตกต่างจากมอเตอร์ธรรมดาคือระบบ Feedback Loop ที่ทำงานดังนี้:
- Command Input: PLC หรือ Motion Controller ส่งคำสั่งตำแหน่ง/ความเร็วเป้าหมาย ผ่าน Fieldbus (EtherCAT, PROFINET) หรือ Pulse/Direction Signal
- Servo Drive Processing: Drive คำนวณค่า Error ระหว่างคำสั่งกับค่าจริงจาก Encoder แล้วปรับกระแสไฟฟ้าที่ส่งไป Motor ด้วย PID Algorithm
- Servo Motor Response: AC Synchronous Motor (Permanent Magnet) หมุนไปยังตำแหน่งเป้าหมายด้วย Torque ที่คำนวณไว้
- Encoder Feedback: Absolute หรือ Incremental Encoder ส่งข้อมูลตำแหน่งจริงกลับไป Drive ที่อัตรา > 1 MHz ทำให้ระบบปรับตัวได้ทันที
ความแม่นยำระดับ Encoder Resolution
Encoder รุ่นใหม่มี Resolution สูงถึง 23-bit (8,388,608 counts/revolution) ทำให้ Servo Motor สามารถหมุนได้แม่นยำในระดับ <0.16 arc-seconds ซึ่งเพียงพอสำหรับงาน Semiconductor Manufacturing ที่ต้องการความแม่นยำระดับ Nanometer
| Parameter | AC Servo | DC Servo | Stepper Motor |
|---|---|---|---|
| Torque Density | สูงมาก | ปานกลาง | ต่ำ (ที่ความเร็วสูง) |
| Speed Range | 0 – 10,000+ RPM | 0 – 5,000 RPM | 0 – 2,000 RPM |
| Positioning Accuracy | ±1 – 10 μm | ±5 – 50 μm | ±50 – 100 μm |
| Feedback | Closed-Loop (Encoder) | Closed-Loop (Tach/Encoder) | Open-Loop (ไม่มี) |
| Response Time | <1 ms | 1 – 5 ms | 5 – 20 ms |
| การใช้งาน | Robot, CNC, High-Speed Line | เครื่องจักรเล็ก | Positioning ง่ายๆ |

การใช้งาน Servo System ในโรงงานอัจฉริยะ
1. CNC Machining Center
เครื่อง CNC ใช้ Servo Motor ควบคุมแกน X, Y, Z และ Spindle ด้วย Interpolation Algorithm ที่คำนวณเส้นทางการตัดเฉือนแบบ Real-Time เครื่อง CNC 5-axis ต้องการ Servo Motor อย่างน้อย 6 ตัว ควบคุมด้วย Bus Cycle Time ≤ 125 μs (EtherCAT) เพื่อให้ได้ Surface Finish ระดับ Ra 0.4 μm
2. หุ่นยนต์อุตสาหกรรม (Industrial Robot)
หุ่นยนต์ 6-axis ใช้ Servo Motor 6 ตัว (หนึ่งตัวต่อหนึ่งข้อต่อ) พร้อม Absolute Encoder ที่ไม่ต้อง Calibration ใหม่เมื่อเปิดเครื่อง ความ Repeatability ของหุ่นยนต์อยู่ที่ ±0.02 mm ซึ่งเป็นผลโดยตรงจากคุณภาพของ Servo System
3. Packaging Machine และ Converting
เครื่องบรรจุภัณฑ์ความเร็วสูงใช้ Servo Motor ควบคุมการตัด ปริ้นท์ และซีล ด้วย Electronic Camming (Virtual Cam) ที่แทนที่ Mechanical Cam แบบเก่า สามารถเปลี่ยน Recipe ได้ภายใน 30 วินาที ลด Changeover Time ได้มากกว่า 80%
4. Printing และ Labeling
เครื่องพิมพ์ Rotogravure และ Flexographic ใช้ Servo Drive ควบคุม Register (การจับตำแหน่งสี) ด้วยความแม่นยำ ±0.05 mm ที่ความเร็ว 300 m/min ระบบ Tension Control ด้วย Servo ช่วยรักษาแรงดึงของ Substrate ให้คงที่ตลอดสายการผลิต
💡 Insight: ตามมาตรฐาน IEC 61800-7 การสื่อสารระหว่าง Servo Drive และ Controller ผ่าน Fieldbus Profile เช่น CiA 402 (CANopen), SERCOS, EtherCAT (CoE) และ PROFINET (RT/IRT) ช่วยให้ Servo ของหลายแบรนด์ทำงานร่วมกันได้
Key Takeaways
- Servo System = Motor + Drive + Encoder ทำงานแบบ Closed-Loop ควบคุมตำแหน่ง ความเร็ว และ Torque ด้วยความแม่นยำระดับ μm
- Encoder Resolution สูงถึง 23-bit ทำให้ Servo รุ่นใหม่เหมาะสำหรับงานที่ต้องการความแม่นยำระดับ Nanometer
- Fieldbus Integration ผ่าน EtherCAT, PROFINET IRT หรือ SERCOS ที่ Cycle Time ≤ 125 μs ทำให้ Multi-Axis Synchronization เป็นไปได้
- Electronic Camming แทนที่ Mechanical Cam ลด Changeover Time > 80% และเพิ่ม Production Flexibility
- มาตรฐาน IEC 61800-7 และ CiA 402 Profile ช่วยให้ Servo Drive หลายแบรนด์สามารถทำงานร่วมกันได้ในระบบเดียว
- แนวโน้ม: Digital Twin ของ Servo System ช่วยจำลองและ Optimize Motion Profile ก่อนลงมือผลิตจริง ลดเวลา Commissioning ได้มากกว่า 50%